 Moteur à
Courant Continue MCC
Moteur à
Courant Continue MCC
La Machine
à Courant Continue
MCC est un convertisseur réversible
d’énergie mécanique en énergie électrique, sous forme de tension
continue :

Principe
de fonctionnement
Un
conducteur qui se déplace dans un champ magnétique et le siège des FEM ( Force ElectroMotrice) :
Fonctionnement Générateur
Un conducteur, parcouru par un courant, placé dans
un champ magnétique se déplace sous l’action des forces de Laplace :
Fonctionnement Moteur
Les
Machines à Courant Continue MCC sont constituées d’un stator/inducteur
(partie fixe de la machine) et d’un rotor/induit (partie tournante de la
machine) séparée par un entrefer.
L’inducteur
Les
pôles statoriques, inducteur, sont constitué d’électroaimant, crée à partir
d’aimants permanents ou de bobinage branché en série.
Ces
bobines sont parcourues par un courant continu d’excitation i.
Créer
une f.m.m ( Force MagnétoMotrice
), sous 2 p bobines qui vont créer 2 p pôles : p
pôles Nord et p pôles Sud
La
répartition des lignes de champs sortes par le pôle Nord
et entrent par le pôle Sud.
L’induit
L’induit est formé de N conducteurs
branché en série, logé dans des encoches, il constitue N / 2 spires bobinées
soudés au collecteur (lames de cuivre isolées entrent-elles). Les balais en
carbone frottent sur le collecteur permettant la liaison électrique de la
plaque à bornes de la machine.
Le balai collecteur se comporte comme un redresseur de tension
unidirectionnel puisque que la tension créée est alternative (pour un
fonctionnement en génératrice).
Mais
la tension créée, dans un fonctionnement en génératrice, est alternative, si bien que le balai
collecteur, permet de la redresser pour fournir une grandeur unidirectionnelle.
On pourra inverser le sens de rotation en inversant
l’un ou l’autre des courant induit I et inducteur i
Les Pertes
|
Pertes |
Pertes fer Pfer = PH + PF Pertes par
hystérésis Pertes par
courant Foucault PH PF Exprimé en Watt Exprimé en Watt |
Pertes
Joules PJ Exprimé en Joules |
Pertes mécaniques Pm Exprimé en Watt |
|
|
Causes |
Elles
sont dues à l’hystérésis (champ rémanent).
PH
augmentent en fonction de l’aire du cycle d’hystérésis. |
L’origine des Fem induites fait naître des courants induits dans le
fer. |
Elles
sont dues aux résistances des bobinages statoriques et rotoriques. |
Elles sont dues aux
frottements et aux pièces en mouvement. |
|
Solutions |
Utilisation
de matériaux à cycles étroits, comme le fer au silicium. |
En feuilletant le
circuit magnétique (ensemble de tôles isolées entrent-elles) |
Utilisation
de ventilation pour refroidir la machine. |
Utilisation
de roulements et de lubrifiants. |
Expression de le Force Electromotrice
E
est la Fem de la machine : Fonctionnement en
génératrice.
E’
est la Fcem qui s’oppose à la tension d’alimentation
U : Fonctionnement en moteur.

Avec E = Force Electromotrice en V
E’ = Force
Contre Electromotrice en V
P = Nombre de
paire de pôles
a = Nombre de
paire de voie d’enroulement
N = Nombre de conducteurs
actifs sous un pôle
n = Vitesse /
Fréquence de rotation en tr/s
Ф = Flux magnétique utile sous un pôle en Webers (Wb)
Posons ![]() alors
alors  →
→ ![]()
Avec 
et que si on admet que le
flux magnétique Ф est constant pour un courant excitation Iexci donnée constant.
Alors ![]() avec
avec ![]()
Remarque :
![]()
Caractéristique Ф ( i )
Cette courbe représente la courbe de magnétisation
du circuit magnétique de l’inducteur de la machine.
On constate :
·
Lorsque Iexci
est faible : Le flux est proportionnel au courant.
·
A partir de certaines valeurs de Iexci, l'acier se sature, le flux croît mais
moins vite que l’intensité Iexci.
·
Lorsque Iexci
redevient nulle, le champ magnétique n'est pas nul (rémanence du circuit
magnétique).
Puissance
& Couple Electromagnétique
Un
conducteur, parcouru par un courant, placé dans un champ magnétique se déplace
sous l’action des forces de Laplace.
Sur
ce principe le rotor de la machine développe une Puissance Electromagnétique à
laquelle correspond et un couple que l’on nommera Couple Electromagnétique.
Puissance
Electromagnétique
![]()
Avec Pe = Puissance Electromotrice en W
T = Couple
Electromotrice en Nm
Ω = Vitesse / Fréquence de rotation en Rad/s
E = Force
Electromotrice en V
I = Courant
induit en A
Couple
Electromagnétique
![]()

Posons ![]() alors
alors 
 →
→ ![]()
(
T % Ф →
Pour avoir Tmax il faut fixer Фmax)
Avec 
et que si on admet que le
flux magnétique Ф est constant pour un courant excitation Iexci donnée constant.
Alors ![]() avec
avec 
Couple
de Pertes
Le
Couple de Pertes Tp est directement lié au Pertes
Collectives Tc
Relation
liant les différents couple de la Machine

Avec Te = Couple Electromotrice en Nm
Tp = Couple perte en Nm
Tr = Couple
résistant en Nm
J = moment d’inertie en kg.m²
Ω = Vitesse / Fréquence de rotation en Rad/s
t = temps en s
Nota :
En régime Transitoire :
L’étude des régimes transitoire (démarrage
(l’accélération) et le freinage (décélération)) impose la connaissance du
moment d’inertie J.
En régime permanent :
 → C’est à dire que la vitesse et constante.
→ C’est à dire que la vitesse et constante.
Les caractéristique mécanique de la
charge et de la machine on un point d’intersection dit de fonctionnement ;
le moment fourni par le moteur est identique au moment du couple résistant de
la charge.
Les
différents types de branchements
On
peut réaliser l’excitation des moteurs de plusieurs façons :
·
Moteur à Excitation Indépendante
·
Moteur à Excitation dérivation : en cours
d’étude
·
Moteur à Excitation Série
Chaque
branchement sera étudié au cours de ce chapitre.
MCCI : Moteur à
Excitation Indépendante

![]()
![]()
Sur
la plaque signalétique de la machine, le constructeur indique les valeurs
nominales des tensions U u et des courants I i, de la fréquence de rotation n et de la puissance
mécanique fournie Pu.

Arbres
des puissances

Les Pertes Collectives Pc
Encore
appelé, pertes constantes, les pertes collectives regroupent les pertes fers et
les pertes mécaniques.
![]()
Pour
détermination des Pertes Collectives Pc à vide :
A
vide ![]()
![]()
Sachant
que Iv est faible ![]()
Alors ![]()
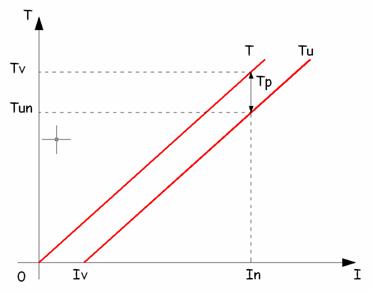
Caractéristique n( I )

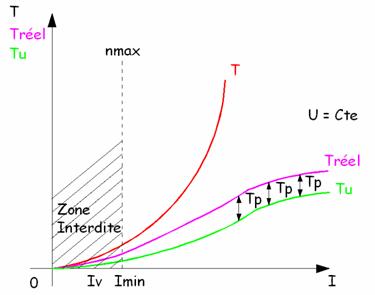
Caractéristique T( I ) Tu( I )
![]()
Caractéristique Tu( n ) & Tr( n
)
Le constructeur fournit la courbe Tu( n
) qui permet de choisir le moteur adapté par rapport à la charge.
On déduit la courbe Tu( n ) point
par point par rapport aux courbes Tu( I ) & T( I )

Le point de fonctionnement P d’un moteur chargé se
situe à l’intersection des caractéristiques mécaniques Tu( n ) et Tr( n ).
Méthode
de résolution :
·
Graphique
·
Par calcule Tu( n ) = Tr( n )
Démarrage
Intensité
du courant de démarrage : Id
L’expression
de ID à l’instant où nous appliquons directement aux bornes de
l’induit immobile sa tension nominale, et la suivante :
Si
la charge impose une montée en vitesse longue, la surintensité prolongée risque
d’être destructrice pour le rotor, ce qui interdit alors le démarrage direct.
Remarque :
On limite souvent la pointe de démarrage à 1.5 In
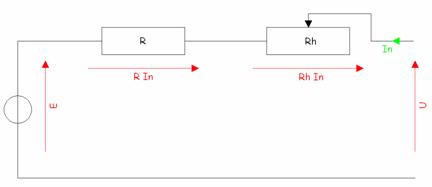
Démarrage
Rhéostatique
En
branchant un rhéostat Rh en série avec l’induit, on limite le courant.
Si
on impose Idmax = In, on pourra faire varier la
vitesse à partir du rhéostat et éliminer la pointe d’intensité.
A
vide E = 0 V
Démarrage
sous une Tension Réduite
On
alimente l’induit sous une tension réduite dite de « décollage » Ud.
La
charge impose au moteur de fournir un couple utile donc un courant dite de
décollage.
![]()
Ce
procédé nécessite une source de tension réglable ; l’intérêt est le
démarrage sans à-coup.
Le
MCCI peut démarrer avec sa charge nominale.
Moteur à Excitation Série
L’inducteur
est en série avec l’induit, il est traversé par le même courant I. Pour
inverser le sens de la rotation, il faudra donc permuter les connexions entre
les circuits d’induits et d’inducteur. On appelle Rt,
la résistance totale du moteur : Inducteur + Induit

![]() avec
avec ![]()
![]()
Arbres
des puissances

Caractéristique n( I )


Si la charge du moteur diminue fortement, I → 0 et n → ∞ : Le moteur série tend à s’emballer à vide, il
doit toujours fonctionner en charge.
n est très variable selon
la charge.
En réalité, quand I ↑ , Ф ↑ , n ↓
Ф ↑ de moins en moins vite dés que le fer commence
à saturer.
Caractéristique T( I )
![]()
Le CM ne sature pas → Ф = K I
→ ![]() fonction parabolique
fonction parabolique
Avec
![]()
Contrairement au MCCI, les Pc ne sont pas
constant.
En admettant :
Les pertes mécanique Pm est proportionnelle à la
vitesse de rotation Ω : Pm = k’’ Ω
Les pertes fer Pf dépend
du flux Ф et de la vitesse Ω : Pf ( Ф,
Ω)
Or quand I ↑ , Ф ↑ ,
n ↓ , Pf ↑ , Pc ↑ , Tu ↓
Ω
Caractéristique Tu( I )
Déduction de la courbe point par
point.

Conclusion :

Type
de démarrage :
Démarrage
Rhéostatique, Démarrage sous Tension Réduite
Règle des trois doigts de la main droite :
→
Pouce F
→
Index I
→
Majeur B